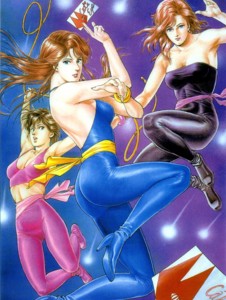
京都大に拠点を置くベンチャー企業「ロボ・ガレージ」(京都市左京区、高橋智隆代表)は7日、ロボット特有のぎこちない動きを克服し、柔らかな物腰の女性型ロボット「FT」(エフティ)を開発したと発表した。ファッションショー形式で行われたお披露目では、すらりと伸びた脚でしなやかに歩く姿を印象付けた。
FTは身長35センチで6頭身、体重は800グラム。部品の配置を工夫して肢体にメリハリをもたせ、女性の繊細なしぐさをプログラミング。従来の二足歩行ロボットはひざを曲げた中腰になった歩行姿勢が一般的だが、独自技術によって、まっすぐな脚や腰のひねりを表現した。
開発した高橋さんは、着せ替え人形「バービー」の歩行実現を目指す米メーカーの構想に着目。プロのモデルの歩き方を研究し、スリムながらも安定感を持たせるため、傾きを検知して自動補正するするセンサーを搭載した。
(時事通信) – 4月7日
画像URL
これのデザインした人間、かなりガチなオタクですね。なにこのロリィでおすましやさんな立ちポーズと大きすぎずそれでいて自己主張たっぷりなバスト。
でも、日本SGIとフラワー・ロボティクスの「Palette」もそうだけど、この手の美形ロボットって作っている方は楽しいけど、ビジネスにならないんですよねえ。産業用ロボットと違ってコスト対効果を判断できるような機能があるわけでないから、その程度のものに買い手が出せる金額ってたかがしれているor金は出せても台数はあくまでもお試し購入レベルのロット。一方、動作スペックと比例して製造コストは高止まりなんで、どうしても発生する金の入りと出のミスマッチ。せめて、モータだけでももっと安く調達できるようにならんと。どっかの日本メーカがマクソン買収して、ロボット用高性能モータを安価で大量供給してくんないかなあ。
それはそうと
>従来の二足歩行ロボットはひざを曲げた中腰になった歩行姿勢が一般的だが
腰のひねりで中腰姿勢を矯正する技術って、もうかなり一般的だと思ってましたけど違うのかな?











コメントを残す